CONNECT
Robotics is the science that explores technology to create and build robots, which are machines created to perform tasks based on commands given by us and, in this way, facilitate people’s activities.
In educational robotics classes, we research, make discoveries and build prototypes, which can be animals, toys, tools or even machines that imitate those we have in real life.
With technological structural assembly kits, made up of many colorful parts, we have at hand an investigative tool to explore everything from the simplest concepts of structural construction to the operation of advanced, engine-driven machines.
Before starting structural robotics classes, you need to understand some basic technological concepts. We will study what bases, beams, connectors, wheels, axles, gears, pulleys, motors and balance are.
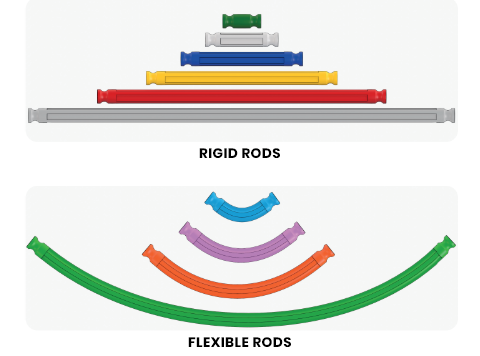
The bases and beams are fundamental pieces to start assembling a project. They are responsible for supporting and structuring the other components. Just like the bases, the beams are part of the project structure. In the structural robotics kit, beams are called rods and come in two types: rigid and flexible.
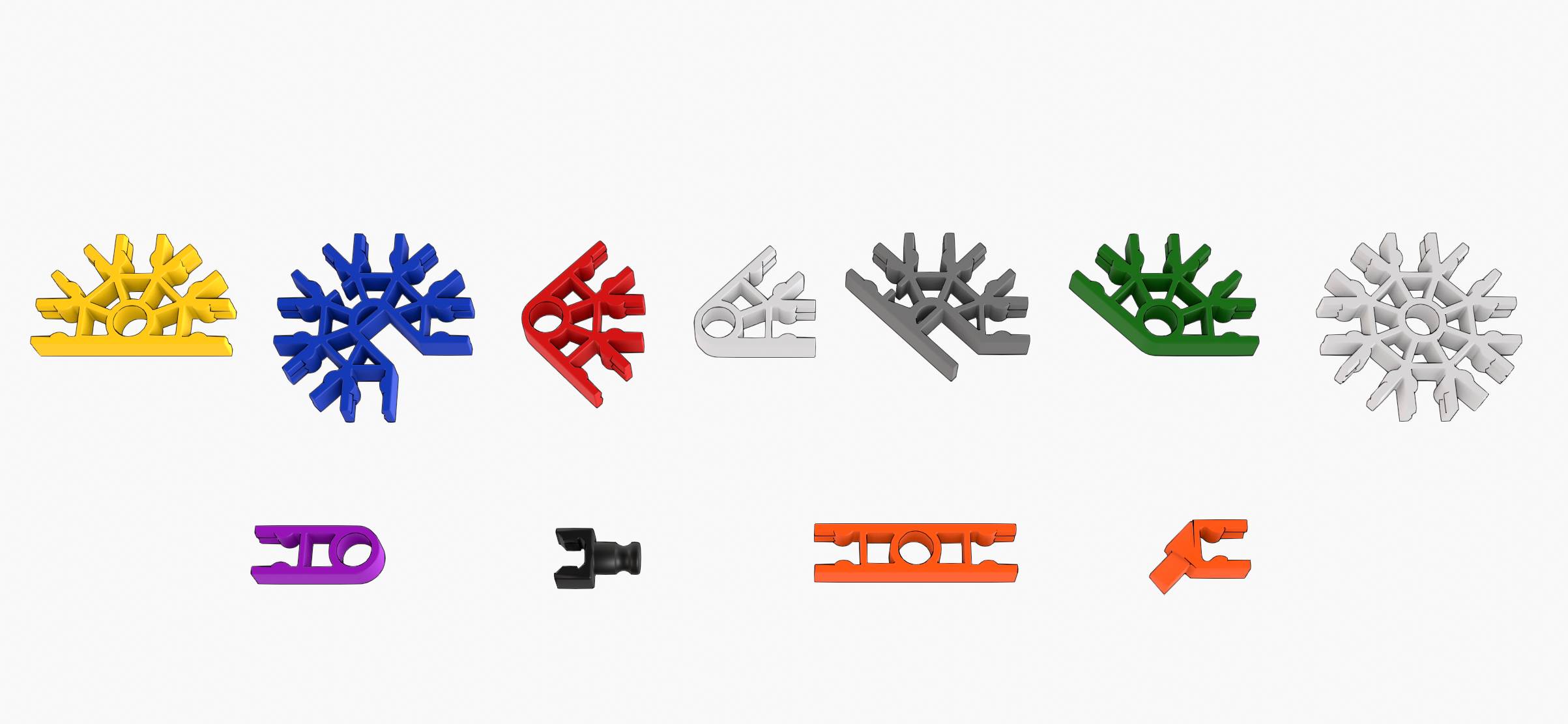
Connectors are parts used to connect components (connect parts) of the project. Connectors can be parts that fit into others by pressure and can have different sizes, shapes and colors.
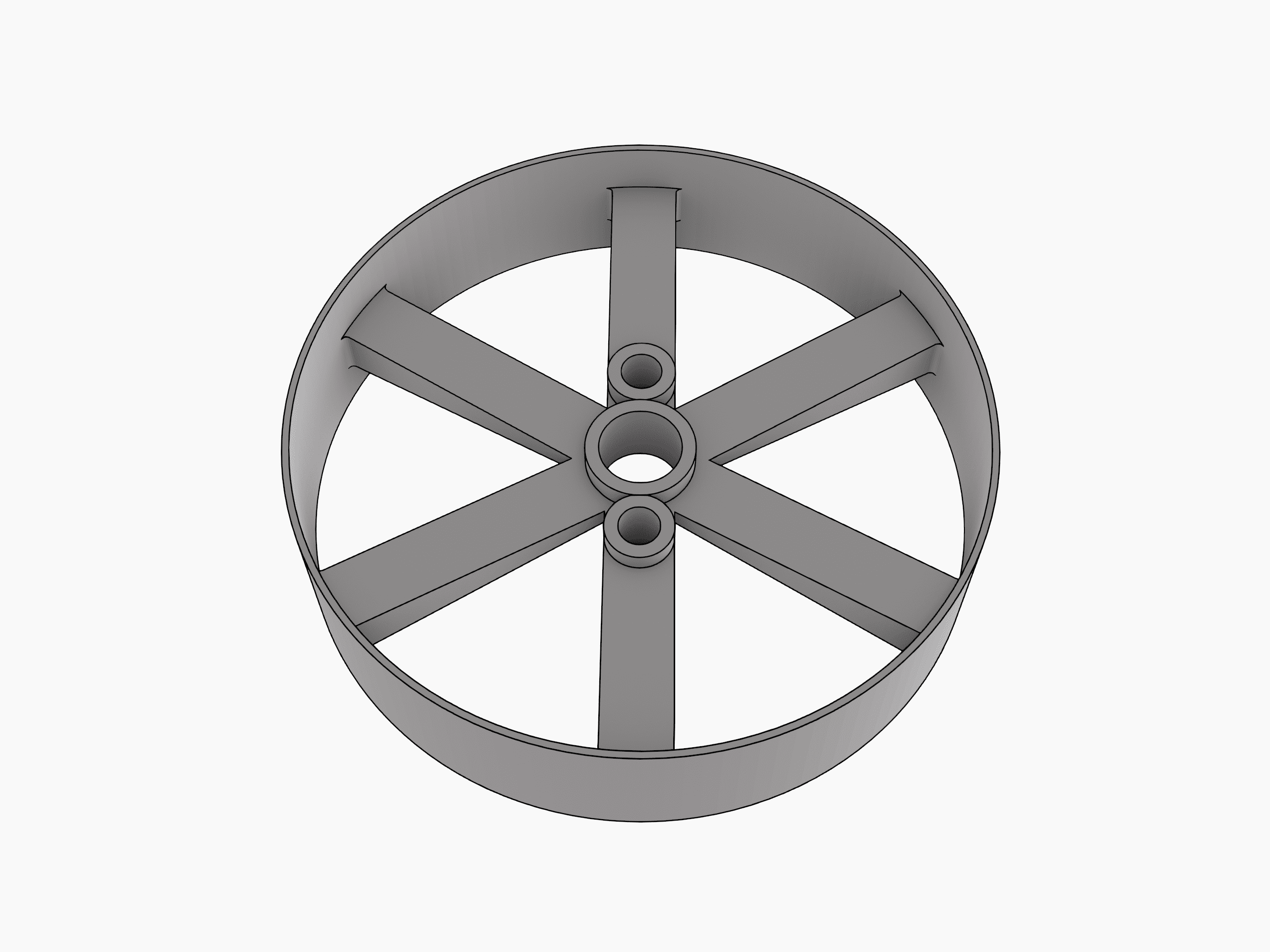
 Wheels are circular objects that facilitate the transport of loads. Axles are objects with a cylindrical shape, smaller than the wheels, which are used to join them. In the structural robotics kit, the axes are called rods.
Wheels are circular objects that facilitate the transport of loads. Axles are objects with a cylindrical shape, smaller than the wheels, which are used to join them. In the structural robotics kit, the axes are called rods.
The wheels and axles always rotate at the same speed. Moving a vehicle or heavy object using wheels makes the process easier.
 A pulley is a wheel with a channel on which a belt is fitted. It is used to transmit movement. When two pulleys are connected by a belt, the one that receives the initial movement is called the input pulley, and the one that is moved from that movement is called the output pulley.
A pulley is a wheel with a channel on which a belt is fitted. It is used to transmit movement. When two pulleys are connected by a belt, the one that receives the initial movement is called the input pulley, and the one that is moved from that movement is called the output pulley.
Gears are wheels with teeth that fit together with the aim of transmitting movement and force between them with great efficiency. When two gears are connected and one of them is moved, either manually or with the help of a motor, we have what is called a driving or input gear. And the one that is moved from this movement made by the input gear is called output gear.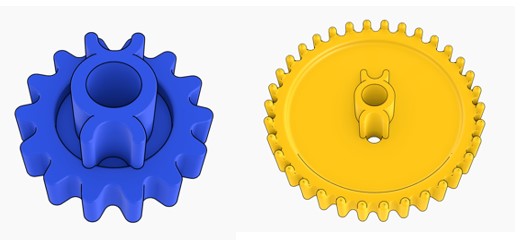
Auxiliary parts are responsible for performing functions such as finishing, spacing and interconnection between parts.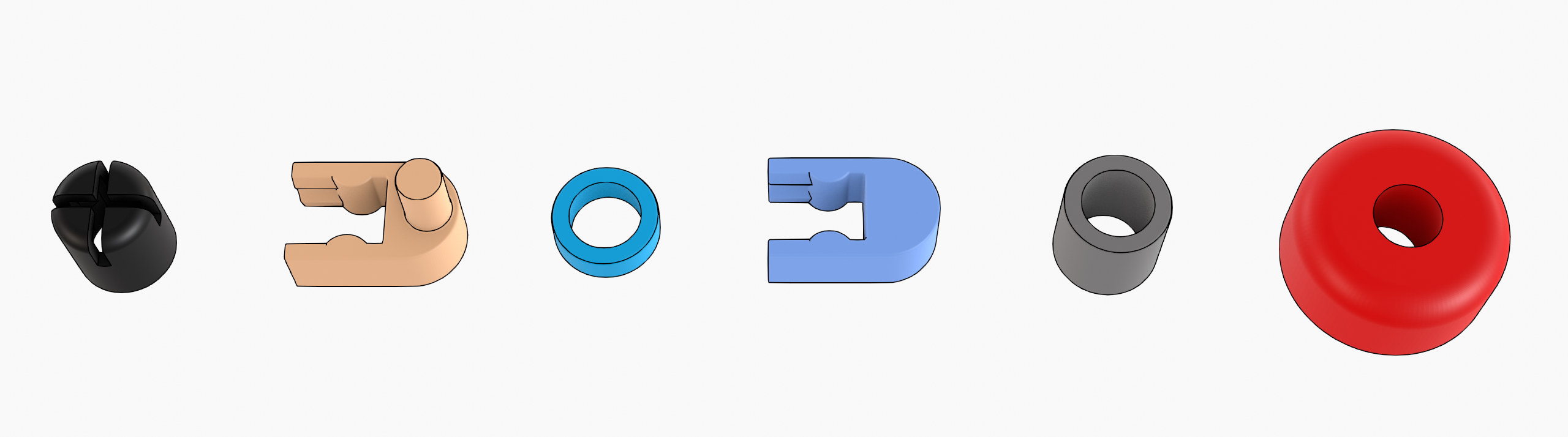
The battery motor, found in our technology kits, is an electric motor that includes a 3V power pack made up of two AA batteries (each battery is 1.5V). The power supply has a three-way switch that allows the motor to operate by turning left or turning right.

To insert the battery motor into a structural robotics model, first push a (very strong) rod through the hole in the middle. Then, try turning the switch on the battery to rotate
the rod in each direction.
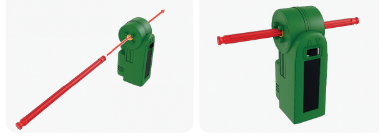
Finally, the easiest way to connect the motor to your model is to fit a white connector to the terminals on each side of the motor.

CONTEMPLATE
Look at your team’s structural robotics kits:
• How many engines do we find in the kit?
• How many auxiliary parts do we find in the kit?
CONSTRUCT
When a body or object is stable, without oscillations or deviations, we say that this body or object is in balance. Furthermore, there are three types of balance, which we will observe a lot in the constructions we will do throughout the classes:

STABLE, UNSTABLE and INDIFFERENT
Stable balance happens when, even moving the object, that is, moving it from its initial position, it tends to return to it. This is the case with those traffic cones. The car can touch them, but they are unlikely to fall to the ground.
Unstable balance happens when we move an object, and it shifts or moves, but finds a new position to remain balanced. Have you ever tried balancing an ice cream cone on the table?
Indifferent equilibrium occurs when a body or object does not tend to return to its initial state of equilibrium, nor to find a new state of equilibrium, because it is already on the surface on which it is supported. Regardless of the displacement the body makes, it will remain in balance. Think about when we’re sleeping in our bed, it’s the same idea.
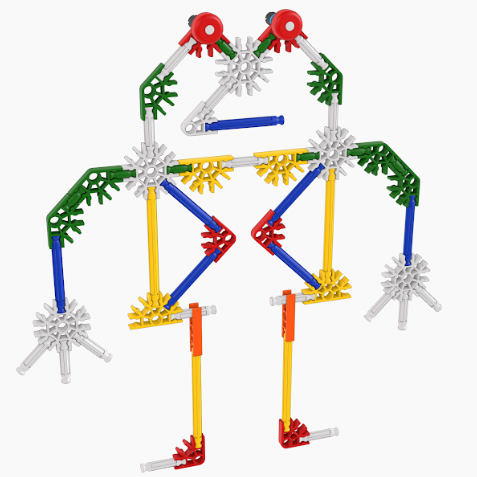
With the pieces from the structural robotics technological kit, as a team, build a prototype of a robot.
CONTINUE
Now that you’ve completed the assembly, share your experiences with your team:
How many rods were used in assembly? And how many connectors?
Did the assembly stand?
Then, save all the materials used.