CONECTAR
Um motor é um dispositivo que converte energia em movimento mecânico para acionar máquinas. Ele pode transformar diferentes formas de energia, como energia elétrica e térmica, em energia mecânica.
Os primeiros motores eram movidos pela força humana, força animal ou força da água. Com o avanço da tecnologia, surgiram diversos tipos de motores movidos a combustão interna, eletricidade, vapor, gás, entre outros.

Cada tipo de motor tem suas próprias características e é utilizado em aplicações diferentes, desde automóveis até equipamentos industriais e ferramentas manuais.
CONTEMPLAR
Existem diferentes tipos de motores que são utilizados com o kit de prototipagem eletrônica.
Conheceremos alguns:
 Motor DC: são motores mais simples que funcionam com uma corrente elétrica contínua, semelhante aos LEDs. Geralmente, esses motores são retirados de impressoras ou carrinhos movidos a pilha e, em projetos de robótica, podem ser reutilizados para evitar que sejam descartados no meio ambiente. Esses motores também são responsáveis pelo funcionamento de diversos eletrodomésticos, como máquinas de lavar, secadoras de roupa, ventiladores, condicionadores de ar e na maioria das máquinas industriais.
Motor DC: são motores mais simples que funcionam com uma corrente elétrica contínua, semelhante aos LEDs. Geralmente, esses motores são retirados de impressoras ou carrinhos movidos a pilha e, em projetos de robótica, podem ser reutilizados para evitar que sejam descartados no meio ambiente. Esses motores também são responsáveis pelo funcionamento de diversos eletrodomésticos, como máquinas de lavar, secadoras de roupa, ventiladores, condicionadores de ar e na maioria das máquinas industriais.
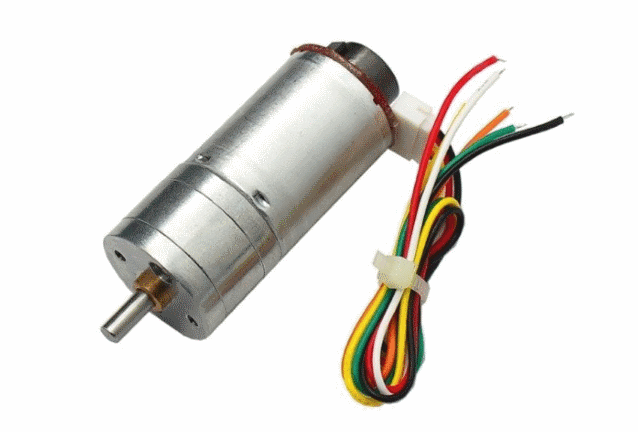
 Motor de passo: são motores que funcionam com corrente contínua, porém, diferentemente dos motores convencionais, eles se movem em passos discretos. Esse tipo de motor é composto por diversas bobinas, organizadas em grupos chamados “fases”. Quando energizadas em sequência, cada fase faz com que o motor gire um passo de cada vez. Os motores de passo são comumente utilizados em equipamentos como impressoras, videogames e impressoras 3D, onde o movimento preciso é essencial para o seu funcionamento.
Motor de passo: são motores que funcionam com corrente contínua, porém, diferentemente dos motores convencionais, eles se movem em passos discretos. Esse tipo de motor é composto por diversas bobinas, organizadas em grupos chamados “fases”. Quando energizadas em sequência, cada fase faz com que o motor gire um passo de cada vez. Os motores de passo são comumente utilizados em equipamentos como impressoras, videogames e impressoras 3D, onde o movimento preciso é essencial para o seu funcionamento.
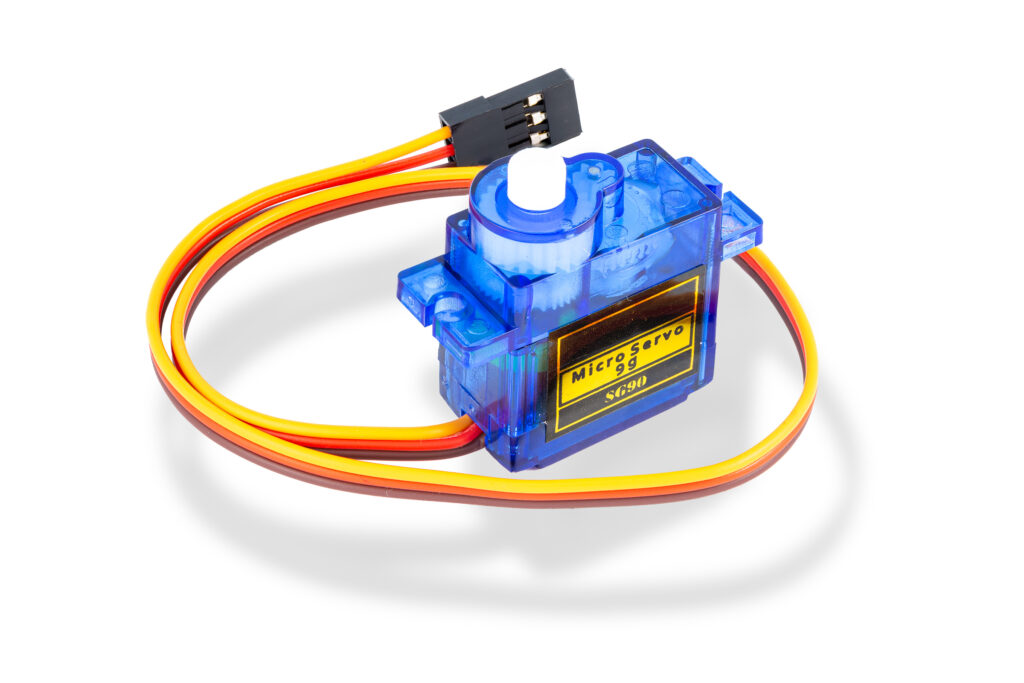 Motor Servo: é um motor que permite o controle preciso da sua posição. Ao contrário de outros motores, o motor servo pode realizar movimentos de rotação de até meia volta e não fica girando continuamente. Esse tipo de motor é utilizado em uma variedade de projetos para controle de posição e movimento e geralmente é empregado em projetos de pequena e média escala. Embora sejam bastante semelhantes, os motores servos são comercializados com ângulos de 180º e 360º de rotação contínua. Além disso, existem modelos de servo que podem dar voltas completas, sendo que cada modelo é indicado para um tipo específico de projeto.
Motor Servo: é um motor que permite o controle preciso da sua posição. Ao contrário de outros motores, o motor servo pode realizar movimentos de rotação de até meia volta e não fica girando continuamente. Esse tipo de motor é utilizado em uma variedade de projetos para controle de posição e movimento e geralmente é empregado em projetos de pequena e média escala. Embora sejam bastante semelhantes, os motores servos são comercializados com ângulos de 180º e 360º de rotação contínua. Além disso, existem modelos de servo que podem dar voltas completas, sendo que cada modelo é indicado para um tipo específico de projeto.
CONSTRUIR
É HORA DO DESAFIO!
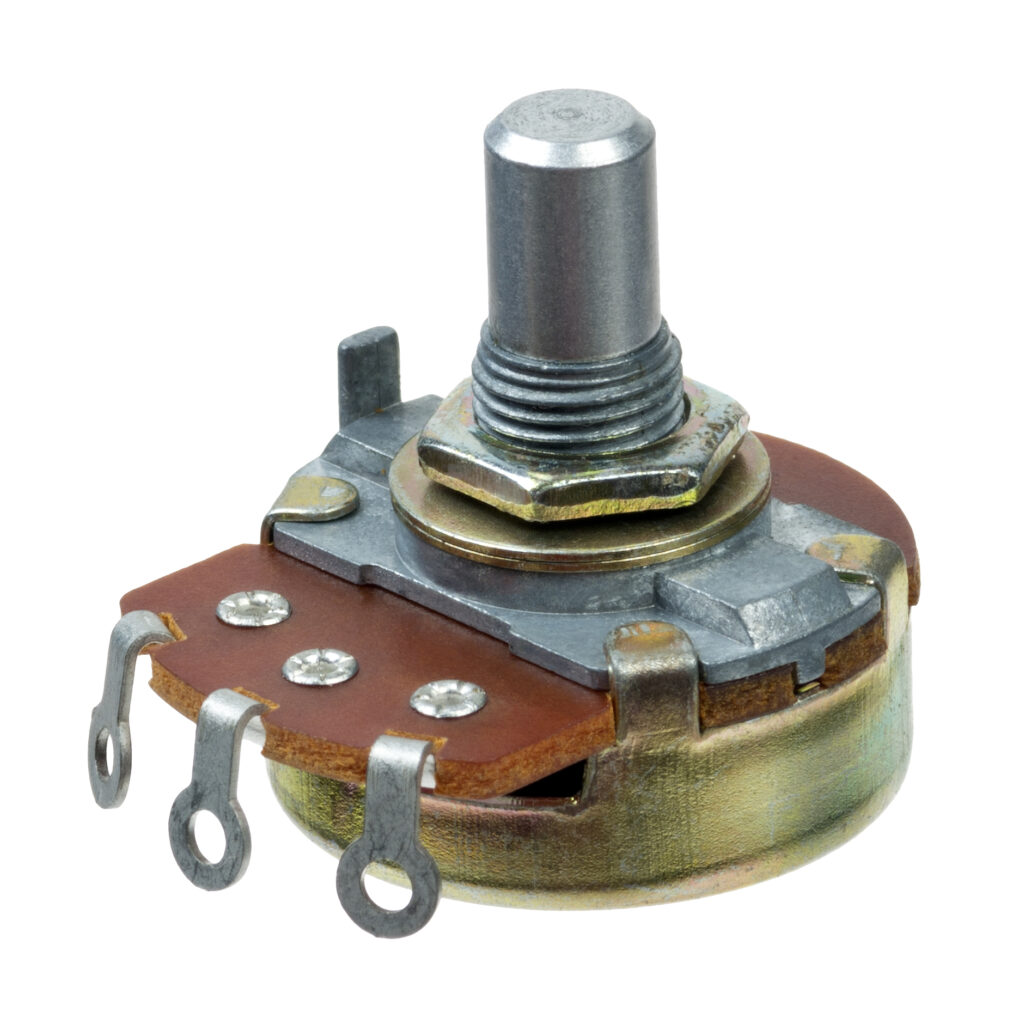 No projeto 10, aprendemos sobre o que é um resistor e neste projeto, utilizaremos um tipo especial de resistor, o potenciômetro variável. Ao contrário de um botão digital, o valor do potenciômetro varia de acordo com a rotação de sua haste e, por isso, deve ser conectado a uma porta analógica da placa do kit de prototipagem eletrônica.
No projeto 10, aprendemos sobre o que é um resistor e neste projeto, utilizaremos um tipo especial de resistor, o potenciômetro variável. Ao contrário de um botão digital, o valor do potenciômetro varia de acordo com a rotação de sua haste e, por isso, deve ser conectado a uma porta analógica da placa do kit de prototipagem eletrônica.
O potenciômetro é frequentemente utilizado em controles de volume, intensidade de lâmpadas e outros ajustes analógicos.
Em equipe, utilize os componentes potenciômetro e motor servo presentes no kit de prototipagem eletrônica. Veremos como utilizar esses dois componentes em conjunto controlando o servo através da rotação do potenciômetro.
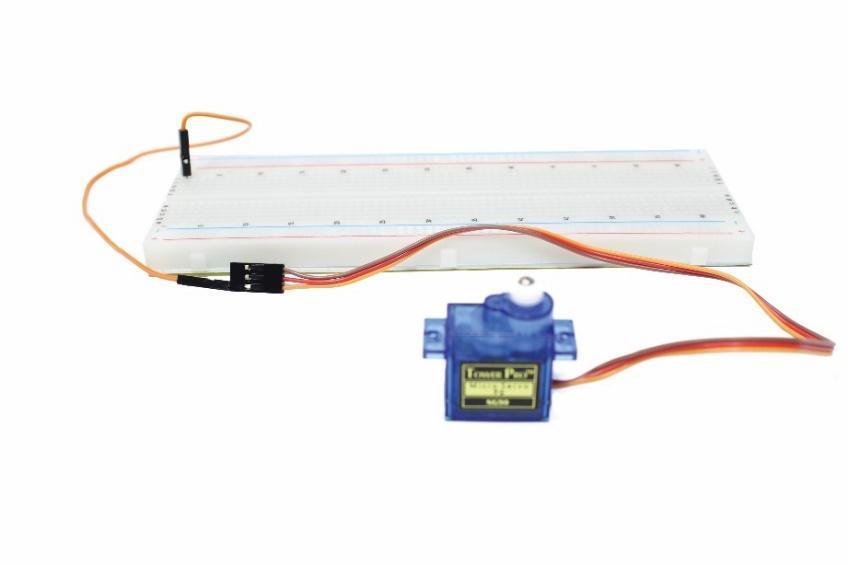
Passo 1: separe os materiais.

Passo 2: O motor servo é composto por três fios (marrom, vermelho e laranja) e um conector de 3 pinos fêmea na extremidade. Para utilizá-lo corretamente, o fio marrom do servo deve ser conectado ao GND, o fio vermelho deve ser conectado ao pino de 5V da placa, e o fio laranja deve ser conectado ao pino 9 da placa.
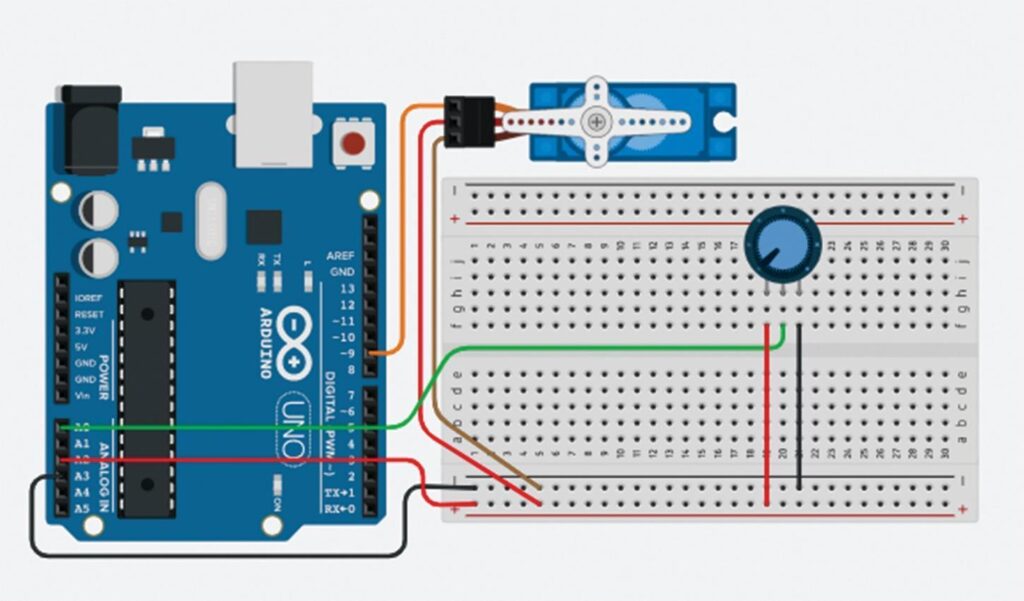
Para conectar o motor servo, basta utilizar 3 jumpers macho-macho e ligar o conector do servo na protoboard. O kit vem acompanhado de algumas hastes e parafusos, porém, não é necessário parafusá-las ao servo, um simples encaixe é suficiente. Para facilitar a visualização do movimento do servo, é possível escolher uma das hastes disponíveis.
Passo 3: Para adicionar o potenciômetro, basta ligar um dos pinos do potenciômetro no +5V da placa, outro no GND e o seu pino central em uma porta analógica da placa. Não há necessidade de se preocupar com o lado correto de conexão, já que o potenciômetro não possui um polo positivo ou negativo definido. No entanto, é importante encaixá-lo corretamente na protoboard, garantindo uma conexão firme.
Passo 4: o professor irá passar a programação 1 para a placa.
Compartilhe com a turma os resultados da construção:
•O protótipo do motor servo funcionou?
•O que aconteceu quando você girou o potenciômetro?
Ao terminar o experimento, guarde todos os componentes no local indicado.