CONECTAR
Robótica é a ciência que explora a tecnologia para criar e construir robôs, que são máquinas criadas para realizar tarefas a partir de comandos dados por nós e, dessa maneira, facilitar as atividades das pessoas.
Nas aulas de robótica educacional, pesquisamos, fazemos descobertas e construímos protótipos, que podem ser bichos, brinquedos, ferramentas ou até mesmo máquinas que imitam as que temos na vida real.
Com os kits tecnológicos de montagem estrutural, compostos de muitas peças coloridas, temos em mãos uma ferramenta investigativa para explorar desde os conceitos mais simples de construção estrutural até o funcionamento de máquinas avançadas, movidas a motor.
Antes de iniciar as aulas de robótica estrutural, é preciso compreender alguns conceitos tecnológicos básicos. Estudaremos o que são bases, vigas, conectores, rodas, eixos, engrenagens, polias, motores e equilíbrio.
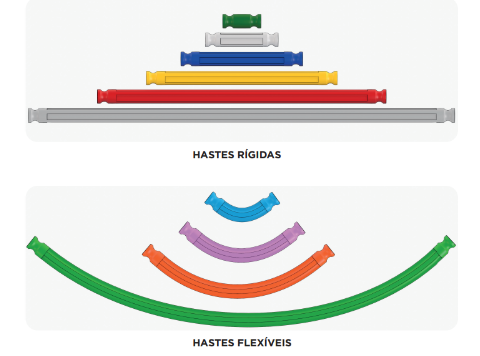
As bases e vigas são peças fundamentais para iniciar a montagem de um projeto. Elas são responsáveis pela sustentação e estruturação dos outros componentes. Assim como as bases, as vigas fazem parte da estrutura do projeto. No kit de robótica estrutural, as vigas são chamadas de hastes e têm dois tipos: as rígidas e as flexíveis.
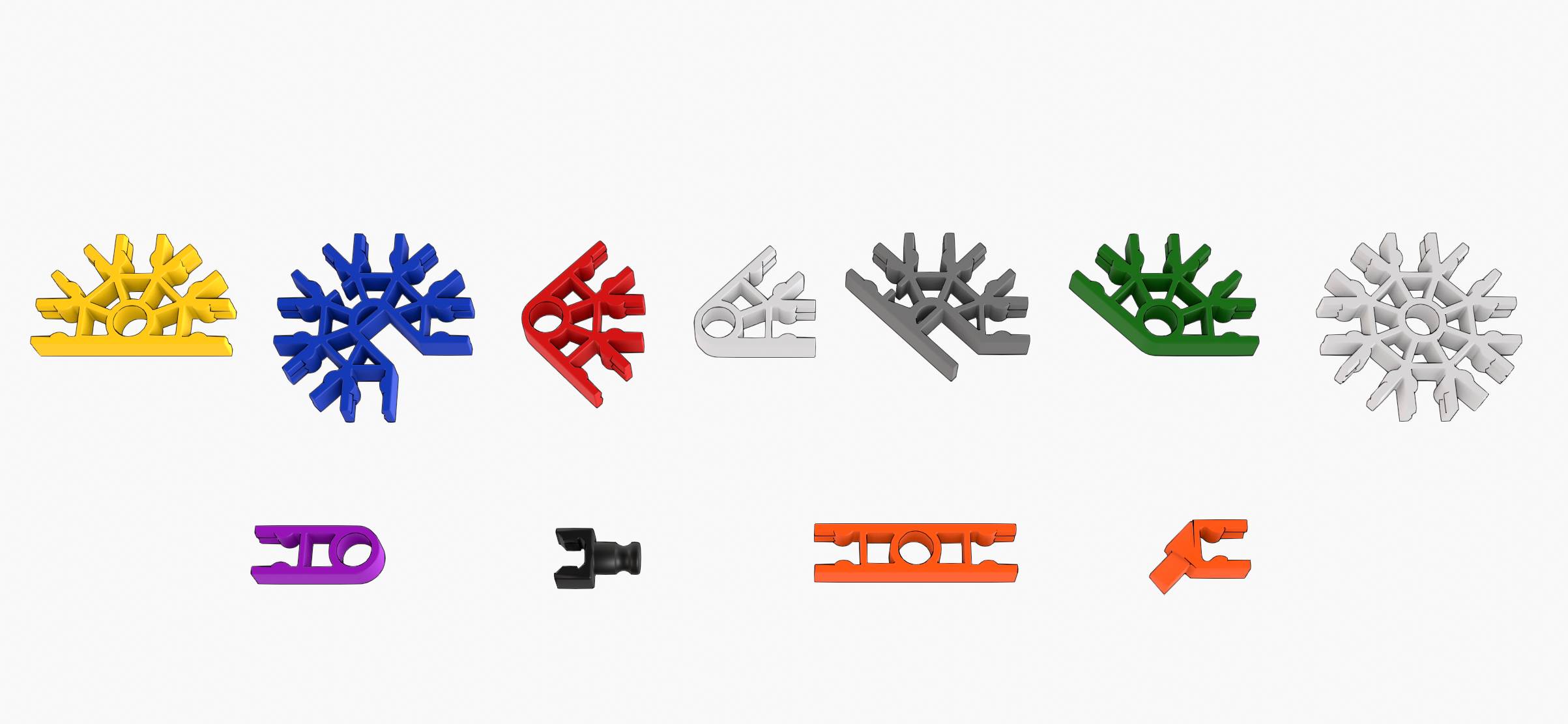
Os conectores são peças usadas para conectar componentes (ligar as partes) do projeto. Os conectores podem ser peças que se encaixam em outras por pressão e podem ter diferentes tamanhos, formatos e cores.
 As rodas são objetos circulares que facilitam o transporte de cargas. Eixos são objetos com formato cilíndrico, menor que as rodas, que é usado para uni-las. No kit de robótica estrutural, os eixos são chamados de hastes.
As rodas são objetos circulares que facilitam o transporte de cargas. Eixos são objetos com formato cilíndrico, menor que as rodas, que é usado para uni-las. No kit de robótica estrutural, os eixos são chamados de hastes.
As rodas e os eixos sempre giram na mesma velocidade. Deslocar um veículo ou um objeto pesado utilizando rodas facilita o processo.
Polia é um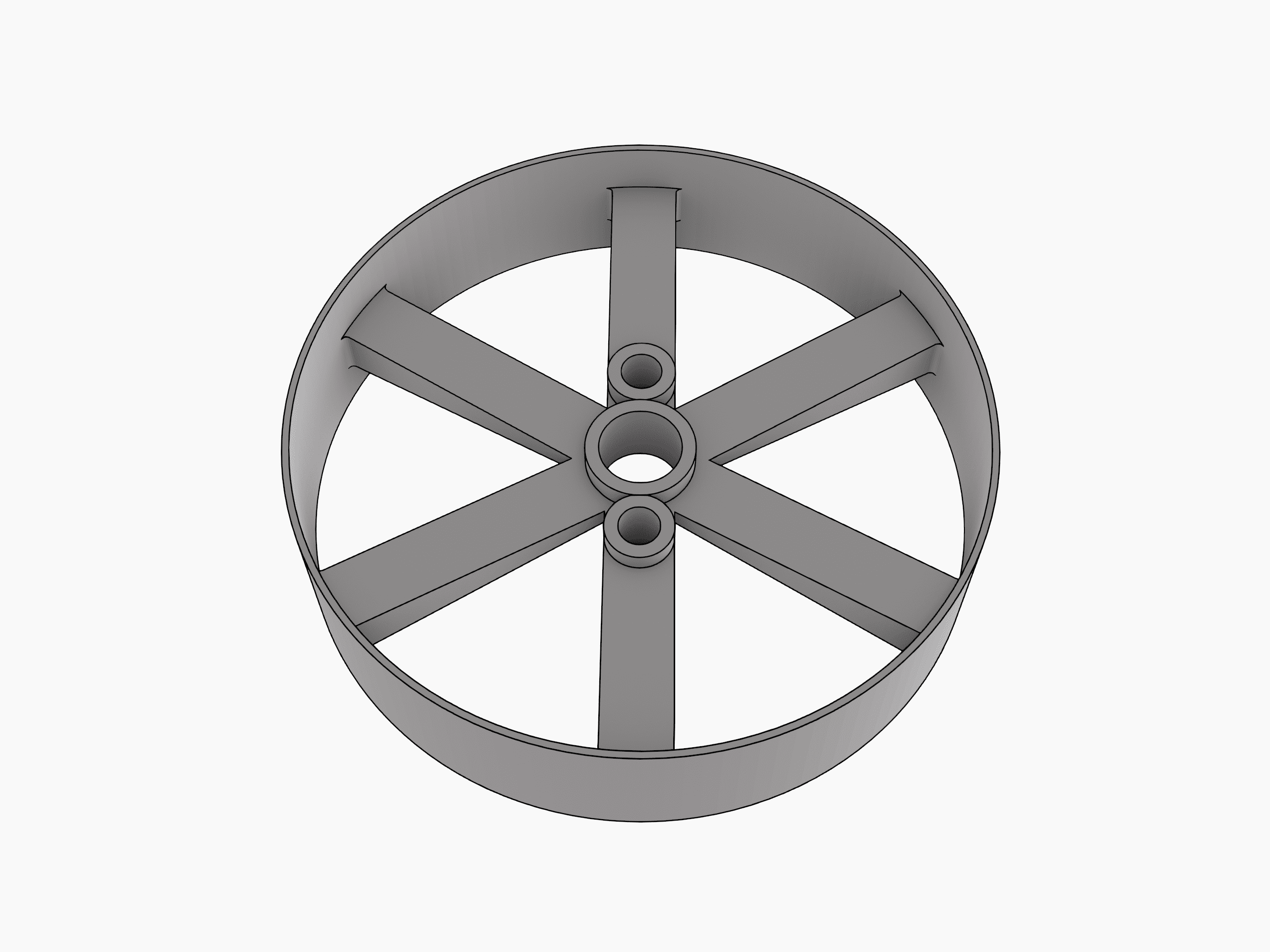 a roda com um canal, no qual é encaixada uma correia. Ela é usada para transmitir movimento. Quando duas polias são conectadas por uma correia, a que recebe o movimento inicial é chamada de polia de entrada, e a que é movida a partir desse movimento é chamada de polia de saída.
a roda com um canal, no qual é encaixada uma correia. Ela é usada para transmitir movimento. Quando duas polias são conectadas por uma correia, a que recebe o movimento inicial é chamada de polia de entrada, e a que é movida a partir desse movimento é chamada de polia de saída.
Engrenagens são rodas com dentes, que se encaixam com o objetivo de transmitir movimento e força entre si com grande eficiência. Quando duas engrenagens são conectadas e uma delas é movimentada, seja manualmente, seja com ajuda de um motor, temos a que é chamada de engrenagem motora ou de entrada. E aquela que é movida a partir desse movimento feito pela engrenagem de entrada recebe o nome de engrenagem de saída.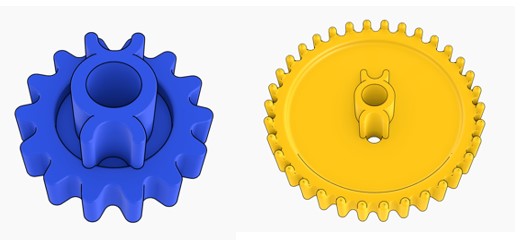
As peças auxiliares são responsáveis por desempenhar funções como acabamento, espaçamento e interconexão entre peças.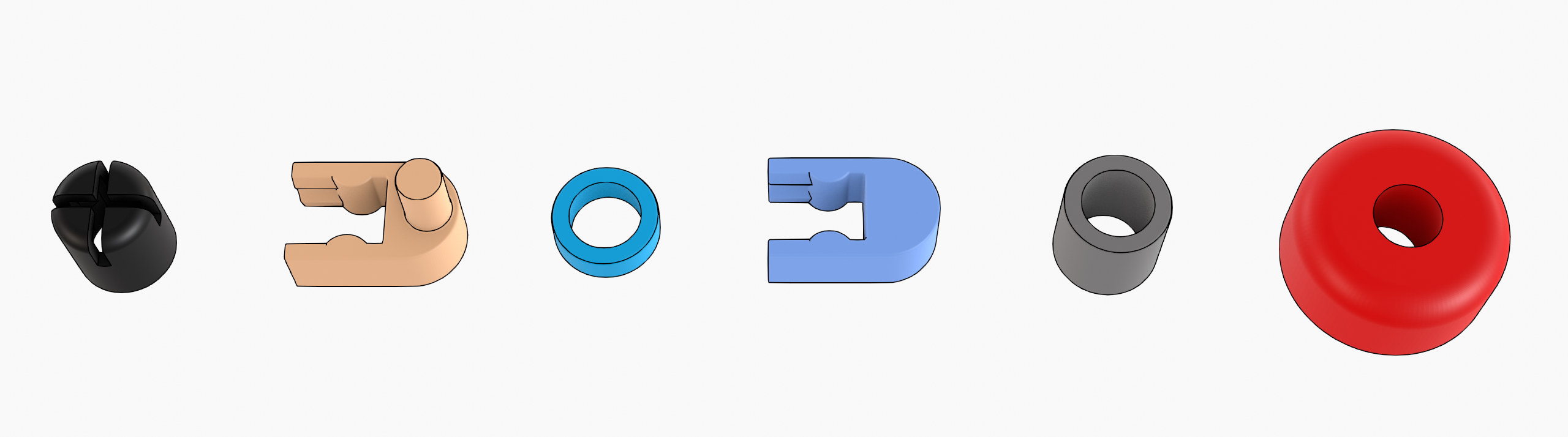
O motor de bateria, encontrado nos nossos kits tecnológicos, é um motor elétrico que inclui um pacote de alimentação 3 V composto por duas pilhas AA (cada pilha tem 1,5 V). A fonte de alimentação tem um interruptor de três vias que permite que o motor funcione girando para a esquerda ou girando para a direita.

Para inserir o motor da bateria em um modelo de robótica estrutural, primeiro empurre uma haste (bem forte) pelo orifício no meio. Depois, experimente ligar o interruptor na bateria para girar
a haste em cada direção.
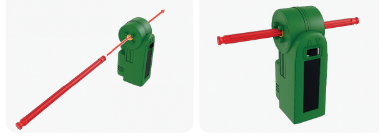
Por fim, a maneira mais fácil de conectar o motor ao seu modelo é encaixar um conector branco nos terminais de cada lado do motor.

CONTEMPLAR
Observe os kits de robótica estrutural da sua equipe:
Quantos motores encontramos no kit?
Quantas peças auxiliares encontramos no kit?
CONSTRUIR
Quando um corpo ou um objeto está estável, sem oscilações ou desvios, dizemos que esse corpo ou objeto está em equilíbrio. Além disso, existem três tipos de equilíbrio, que vamos observar muito nas construções que iremos fazer ao longo das aulas:

ESTÁVEL, INSTÁVEL e INDIFERENTE
Equilíbrio estável acontece quando, mesmo mexendo no objeto, ou seja, deslocando-o da sua posição inicial, ele tende a voltar para ela. É o caso daqueles cones de trânsito. O carro pode encostar neles, mas dificilmente eles irão cair no chão.
Equilíbrio instável acontece quando mexemos em um objeto, e ele se desloca ou se movimenta, mas encontra uma nova posição para continuar equilibrado. Já tentou equilibrar uma casquinha de sorvete em cima da mesa?
Equilíbrio indiferente acontece quando um corpo ou objeto não tem a tendência de voltar ao seu estado de equilíbrio inicial, nem de achar um novo estado de equilíbrio, porque ele já está sobre a superfície em que está apoiado. Independentemente do deslocamento que o corpo fizer, ele continuará em equilíbrio. Pense em quando estamos dormindo na nossa cama, é a mesma ideia.
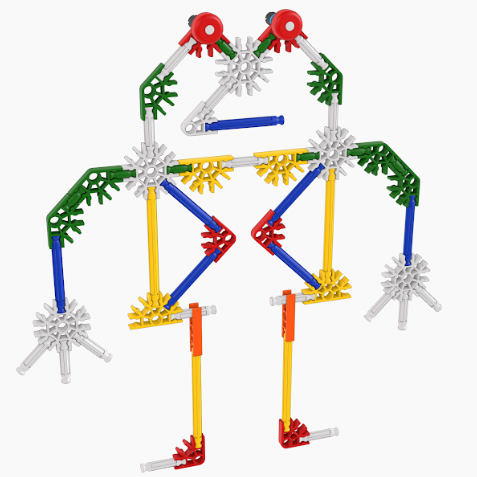
Com as peças do kit tecnológico de robótica estrutural, em equipe, construa o protótipo de um robô.
CONTINUAR
Agora que você já fez a montagem, compartilhe as experiências com a sua equipe:
Quantas hastes foram usadas na montagem? E quantos conectores?
A montagem ficou de pé?
Em seguida, guarde todos os materiais utilizados.